Projects
Rapid Acceleration and Manoeuvrability (RAM)
Mobile robots are increasingly able to achieve high top speeds, and work in challenging environments that are beyond the capabilities of humans and animals, but they still can’t match the manoeuvrability of their natural counterparts. When it comes to navigating difficult terrain at high speed, and accelerating, turning or stopping rapidly, animals leave robots far behind. The RAM Research Group aims two answer two questions:
- What makes animals so manoeuvrable?
- How can we design robots which are as manoeuvrable as animals are?

Legged Manoeuvrability Study
In nature, legs are the most common solution to the problem of land locomotion, but they are used far less in the field of mobile robotics. One contributing factor could be that legged manoeuvrability is still poorly understood. This project investigates the dynamics and control of rapid legged manoeuvres, with a particular focus on quadrupeds, culminating in the development of a highly manoeuvrable legged robot.

Optimal Motions for Rapid Acceleration and Deceleration
There has been very little research into the motions required to bring about rapid acceleration, and especially deceleration, in legged animals. This research aims to identify these motion patterns by applying trajectory optimization techniques to mathematical models of quadrupeds and bipeds.

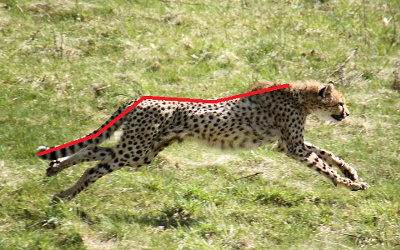
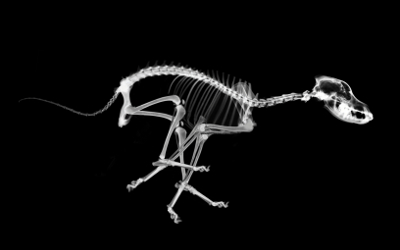
Spines and Manoeuvrability
Greyhounds and cheetahs have many physical similarities, but why are cheetahs much faster and more manoeuvrable? One answer could be that the cheetah has a much more flexible spine, which actively contributes to its motion. This research investigates how an active spine can be used to improve manoeuvrability.
Optimal Leg Configurations for Manoeuvrability
Nature has produced wide variation in leg morphologies: the forward-facing knees of the human vs. the backward-facing knees of the ostrich, for instance. This project investigates which leg configurations have the greatest benefit to manoeuvrability.
Tailed Manoeuvrability Study
Tails contribute to the manoeuvrability of animals in a variety of ways, from allowing a falling lizard to right itself, to stabilising a cheetah as it rapidly brakes to a standstill. This research investigates the dynamics of tails, and explores how they can be applied to improve the manoeuvrability of mobile robots.
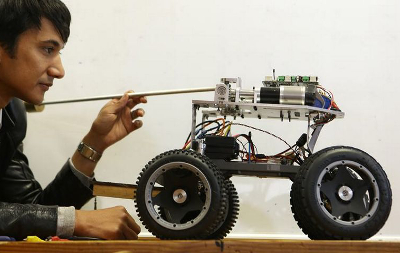
DIMA: cheetah-inspired manoeuvrability
DIMA is a novel tailed robot designed to test the ability of cheetah-inspired motions of an active tail to stabilise rapid manoeuvres. The first version used a single degree-of-freedom tail to improve acceleration and deceleration, while the second added an additional degree-of-freedom, allowing the tail to move in a conical motion and stabilise rapid turns.
Flipbot: tail-assisted aerial righting
Flipbot is a lizard-inspired plaform which demonstrates the ability of tails to assist in aerial manoeuvres. It uses a single degree-of-freedom tail to perform a 360 degree barrel roll in mid-air.

Aerodynamics of Bushy Tails
Measurements of a cheetah tail showed that it is lighter and has lower inertia than would be expected. How, then, does it produce the observed enhancements to the animals’ manoeuvrability? Wind tunnel testing revealed that the long, thick fur on the tail allows it to generate large drag forces without a weight penalty.

High Speed Motion Capture
This project develops a low-cost motion capture system which the RAM Research Group can use to collect data describing the motion of fast animals, such as cheetahs and greyhounds.

Spine Capture
Our research into the biomechanics of the cheetah needs to be based around a strong core of animal motion data. The purpose of this project is to develop a cost-effective system which can be used to track the motion of the cheetah’s flexible spine and tail.
Footfall Capture
This project aims to augment our animal motion capture system by adding sensors that can track the paw contacts. This will allow the complete motion of fast quadrupeds to be studied.

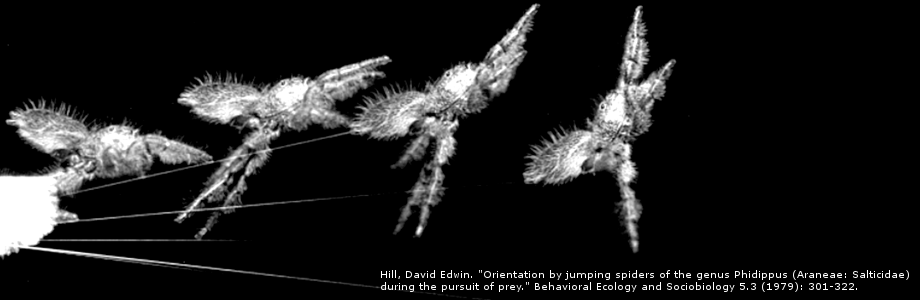
LEAP: Spider-Inspired Aerial Righting
A 2013 study by Jung Kang Chen and colleagues showed that jumping spiders use a silk dragline to stabilise themselves in the air. By tugging on this line, they can slow themselves down and correct their body pitch angle to achieve a stable landing. The LEAP (Line-Equipped Aerial Platform) is a small mobile robot which uses a mechanism inspired by these spiders to bring about aerial righting.
LEAP I
The first phase of the LEAP project involved mathematically modelling and simulating the spider and dragline system to develop and understanding of its dynamics. The original version of the LEAP was a simple proof-of-concept design, which showed that an open-loop dragline mechanism could produce similar results to those seen in the spider.
